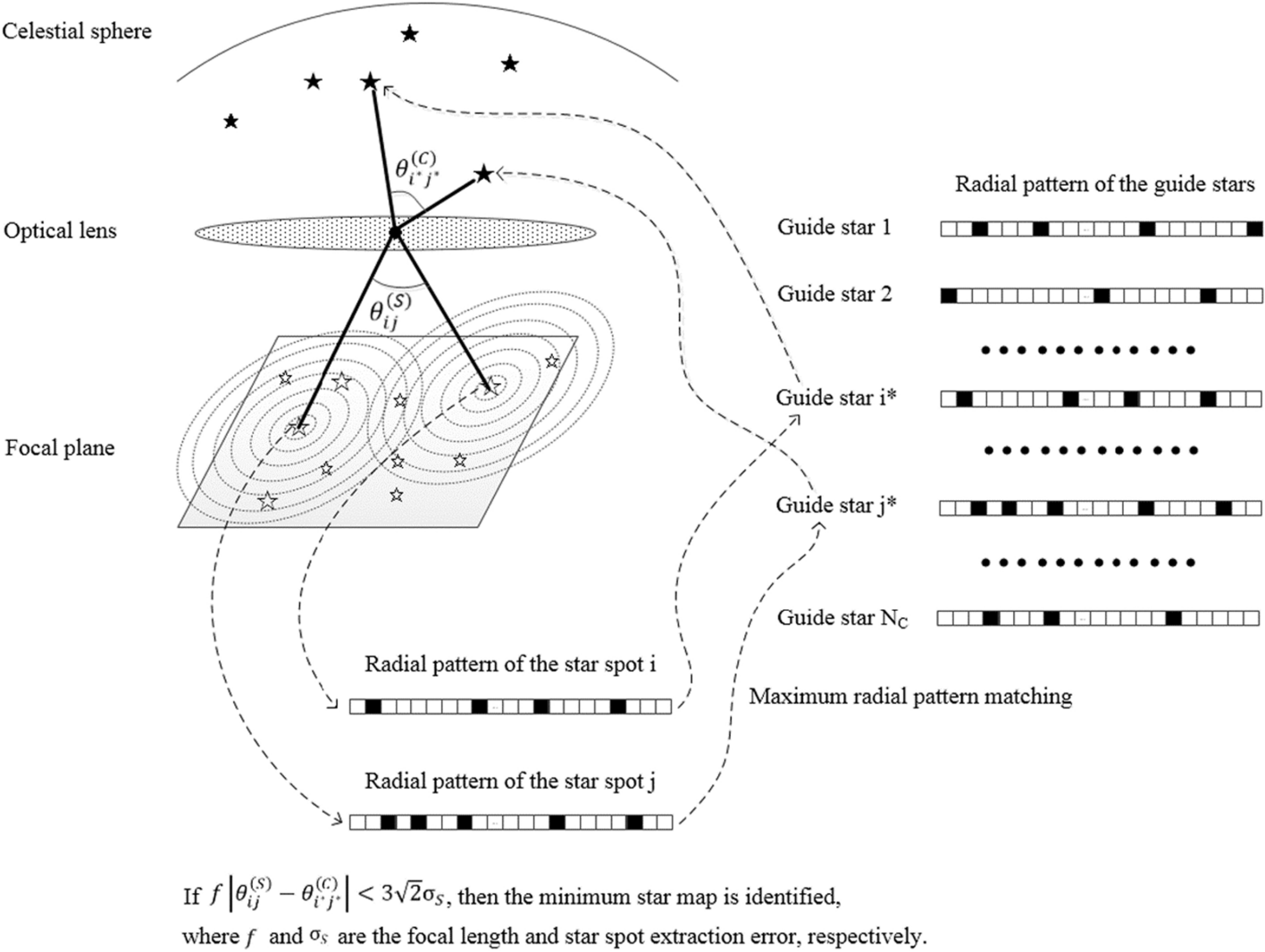
This paper proposes an all-sky star map identification algorithm that can simultaneously achieve high identification probability, low algorithm complexity, and small databases for well photometric and intrinsic parameters-calibrated star sensors. The proposed algorithm includes three main steps. First, a binary radial pattern table is constructed offline. Then, the maximum value matching of the radial pattern is performed between the star spots and the guide stars, and the star pairs (i.e., the minimum star map) after radial pattern matching undergo a coarse matching through angular distance cross-validation. Finally, a reference star map is designed based on the identified star pairs, and the matching of all the star spots in the field of view is realized. Simulation and analysis results show that the database required by the proposed algorithm for 5,000 guide stars is not larger than 200 KB. Also, when false and missing star spots account for 50% of all guide stars and the star spot extraction error is 0.5 pixel (the corresponding pointing error is 26″), the average star map identification time of the proposed algorithm is less than 2 ms, and its identification probability is higher than 98%. The results demonstrate that the proposed algorithm performs better than similar algorithms.